
-
- Tischzentrifugen
- Standzentrifugen
- Gekühlte Zentrifugen
- Mikrozentrifugen
- Mehrzweckzentrifugen
- Hochgeschwindigkeitszentrifugen
- Ultrazentrifugen
- Concentrator
- IVD Produkte
- High-Speed and Ultracentrifuge Consumables
- Zentrifugenröhrchen
- Zentrifugenplatten
- Gerätemanagement
- Proben- und Informationsmanagement
-
- Manuelles Pipettieren & Dispensieren
- Mechanische Pipetten
- Elektronische Pipetten
- Mehrkanalpipetten
- Direktverdrängerpipetten & Dispenser
- Automatisches Pipettieren
- Flaschenaufsatzdispenser
- Pipettierhilfen
- Pipettenspitzen
- Verbrauchsartikel für die Automation
- Zubehör für Dispenser & Pipetten
- Zubehör für die Automation
- Services für Dispenser & Pipetten

Große Sprünge machen
Beyond Science
- Research
- Off the Bench
- Off the Bench
- Inspiring Science
Weiche Materialien und eine intensivere Interaktion mit dem Menschen: Roboter können immer mehr. Dabei orientiert sich die Forschung an Tieren und Pflanzen. Bionik als Perfektionsmodell.
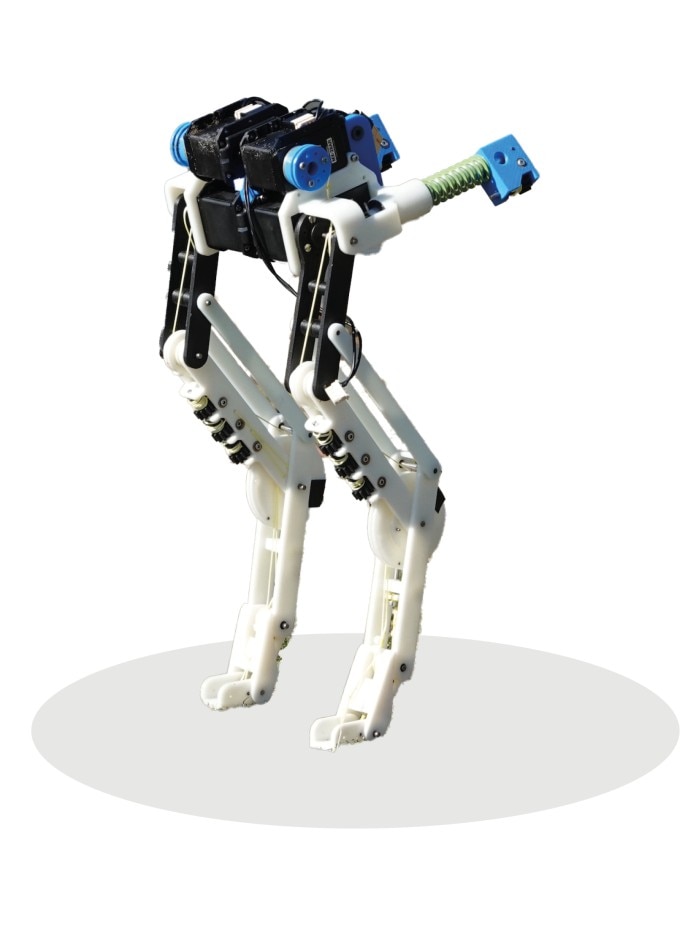
Flink wie ein Vogel
Ein evolutionäres Erfolgsprinzip, das die Forschenden des MPI-IS nun auf einen Roboterlaufmechanismus übertragen haben. Und tatsächlich habe sich der sogenannte BirdBot bei Testläufen wie der Bewegungsapparat realer Strauße durch besonders hohe Effizienz ausgezeichnet, erklärt Alexander Badri-Spröwitz, Leiter der Forschungsgruppe Dynamische Lokomotion am MPI-IS. „Früher mussten unsere Roboter entweder beim Stehen oder beim Beinanziehen gegen die Feder oder mit einem Motor arbeiten, damit das Bein in der Schwungphase nicht mit dem Boden kollidiert.“ Das sei beim BirdBot nicht mehr erforderlich. „Insgesamt ist damit nur ein Viertel der Energie notwendig im Vergleich zu vorhergehenden Laufrobotern“, ergänzt Mitentwickler Alborz Aghamaleki Sarvestani. Nach Ansicht der Forschenden ließe sich das Roboterbein beliebig skalieren. Auch riesige Roboter könnten auf diese Weise mit geringem Energieaufwand zum Laufen gebracht werden.
Bionik nennt sich das Prinzip, das sich Strategien von Tieren und Pflanzen abschaut, um sie auf Technik zu übertragen. Das reicht von Robotergreifern, die sich an Krakenarmen orientieren, über Wartungsroboter, die mit der Flossenbewegung des Meeresstrudelwurms durch Röhrensysteme schwimmen, bis hin zu speziellen Beschichtungen, die Haifischhaut ähneln, um die Aerodynamik von Flugzeugen zu verbessern. Lufthansa Cargo will ab diesem Jahr ihre gesamte Flotte mit der Technologie ausstatten, um auf diese Weise jährlich rund 3.700 Tonnen Kerosin und fast 13.000 Tonnen CO₂ einzusparen.
Optisch werden die Giganten der Lüfte künftig keine Ähnlichkeit mit den Herrschern der Meere aufweisen. Und das hat Methode. Denn die Bionik versucht ihre Vorbilder nicht einfach zu imitieren, sondern gestützt auf die Strategien der Natur, innovative Antworten auf technische Fragen und Anforderungen zu geben.
Mehr erfahren
Weniger lesen
Immer interdisziplinär
Experten aus Biologie, Physik, Material- und Ingenieurwissenschaften arbeiten dabei grundsätzlich interdisziplinär zusammen. Besonders angetan hat vielen Forschenden dabei vor allem die Energieeffizienz, Leichtbauweise und Verbindung aus Kraft und Flexibilität in der Natur – Qualitäten, die tonnenschweren Industrierobotern aus starrem Stahl naturgemäß abgehen. Das noch junge Feld der Softbots – der flexiblen Roboter aus weichen Materialien – wäre kaum denkbar ohne die natürlichen Vorbilder. Der deutsche Hersteller Festo entwickelt auf diese Weise Roboter und Greifer, die gefahrlos mit menschlichen Kollegen interagieren können.
Softe Roboter empfehlen sich aufgrund ihrer Flexibilität aber auch für Extremsituationen: So ließen chinesische Forschende einen vom Scheibenbauch – einer Fischart – inspirierten Roboter an die tiefste Stelle unserer Ozeane abtauchen – in den Marianengraben: Dort hielten der kleine Roboter aus Silikon und seine dezentrale Elektronik dem Druck der elf Kilometer hohen Wassersäule stand.
Ein Team der University of Colorado Boulder in den USA und des MPI-IS in Stuttgart hat sich seinerseits die Spinne zum Vorbild genommen. Ihr Arachnobot kann das Zehnfache seiner Körperhöhe überspringen. Dreh- und Angelpunkt sind die von Spinnen inspirierten Gelenke, die durch den Einsatz hydraulischer Kräfte ähnlich wie die Beinstreckung des Tieres funktionieren. Den Forschenden zufolge sind diese Gelenke hoch funktional, einfach und billig herzustellen und verbrauchen wenig Strom. „Das ultimative Ziel unserer Forschenden war nicht, einen Spinnenroboter zu bauen“, sagt Philipp Rothemund vom MPI-IS. „Wir wollten ein hochmodernes, aktives Gelenk entwickeln, das man in jeden Robotertyp einbauen kann.“
Bis es so weit ist, müssen die Forschenden allerdings noch einige Hürden nehmen. Denn ihre Softbots seien mit herkömmlichen und standardisierten Robotersystemen nicht unmittelbar kompatibel, erklärt Christoph Keplinger, Direktor am MPI-IS: „Wir müssen daher neuartige, effektive und robuste Schnittstellen für diese funktionalen weichen Materialien entwickeln, um einzelne Komponenten in leistungsstarke Robotersysteme zu integrieren.“
Nicht alle bionischen Konzepte schaffen es in die Praxis. Das ist auch nicht unbedingt das Ziel. Viele verstehen sich als angewandte Grundlagenforschung, wollen gleichermaßen die Biologie und die Technik voranbringen. Schließlich ist es mit der Bionik wie mit ihren natürlichen Vorbildern: Es braucht manchmal eine längere Entwicklung, bis sie zur Perfektion heranreifen.
Mehr erfahren
Weniger lesen